Agility Robotics Secures $8M Series A Funding
Monday, June 2nd, 2025
Agility Robotics, a company that designs and builds walking and running robots for advanced mobility in human environments, raised $8 million in Series A funding to accelerate product, technology, and business development.
Cassie
Led by Mechanical Engineering Assistant Professor at Oregon State Univeristy, Jonathan Hurst, Ph.D., and business partner Damion Shelton, Ph.D., Agility Robotics was founded in late 2015 as a spinoff from Oregon State to commercialize research from the Dynamic Robotics Laboratory on bipedal locomotion.
In 2015, Agility developed their first robot called "ATRIAS" as the culmination of a 7 year research program to build a bipedal robot that captures the dynamics of animals. Animal-like dynamics yield animal-like capabilities “for free”.
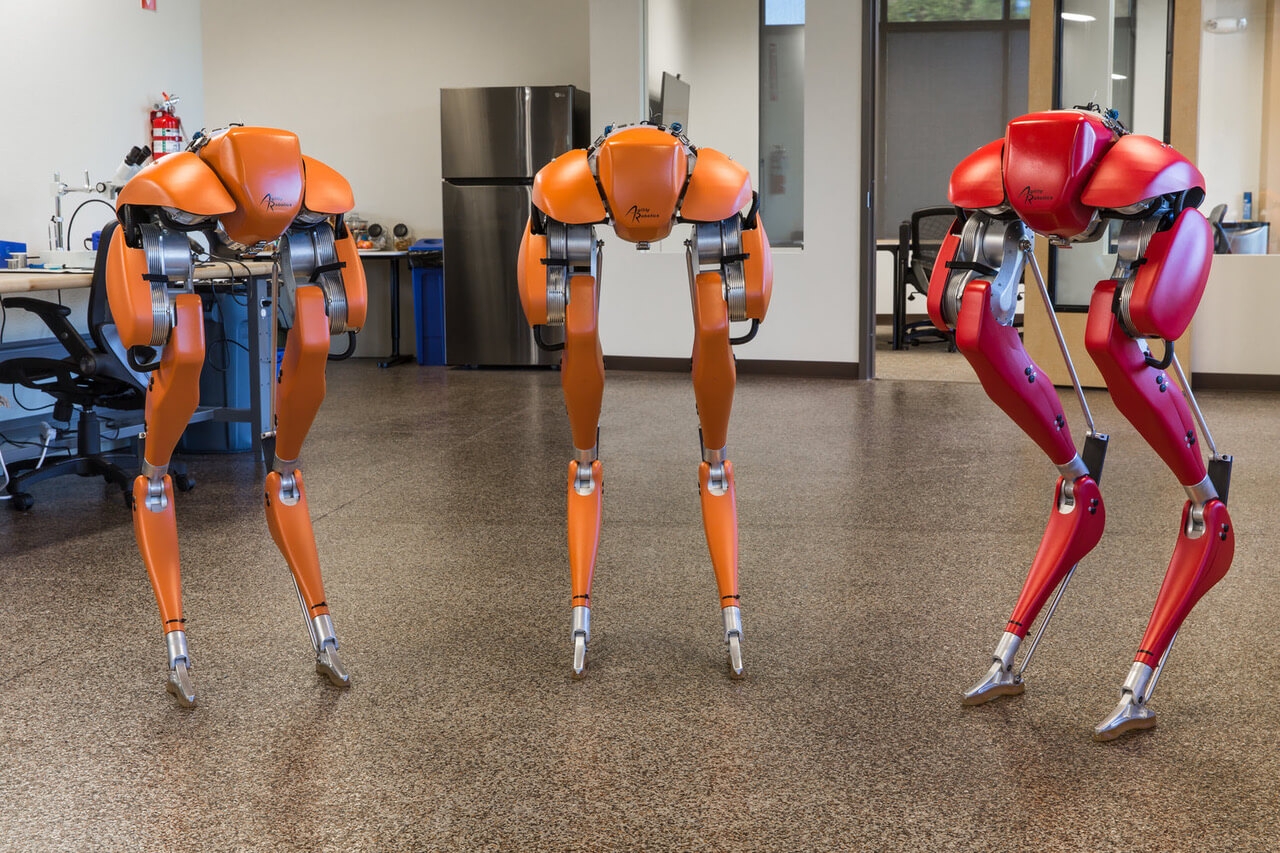
In 2016, "CASSIE version 1" was developed as the result of engineering optimization on the design principles of ATRIAS; capturing animal-like dynamics while producing a rugged product for customers. Cassie v1 was further refined into v3 (upper left photo), the version launched commercially in 2017, with the goal to "Go where humans go".
ONAMI's engagement with Jonathan and Damion began in late 2015 with a short but informative meeting in Jonathan's office at OSU. Following the meeting, ONAMI, Jonathan and Damion worked to review the company's business model, target market size, early customers and potential investors. In March 2017, ONAMI provided Gap funding to help Agility develop a product which could be sold to research institutions, and demonstrate successful robot operation that could attract equity investment.
In early 2018 Agility closed $8 million in Series A funding to accelerate product, technology, and business development. Playground Global led the round, with participation from Sony Innovation Fund and existing investor Robotics Hub. Bruce Leak, a founder of Playground Global, joined Agility’s board of directors. Agility’s total amount raised is now $8.792 million.